当研究室では、超小型衛星プロジェクトと密接に関連するテーマを中心に、基礎から応用まで幅広い研究に取り組んでいます。
宇宙を自在に航行する未来を目指して
最先端の研究を、超小型衛星で実証する
軌道力学・軌道設計
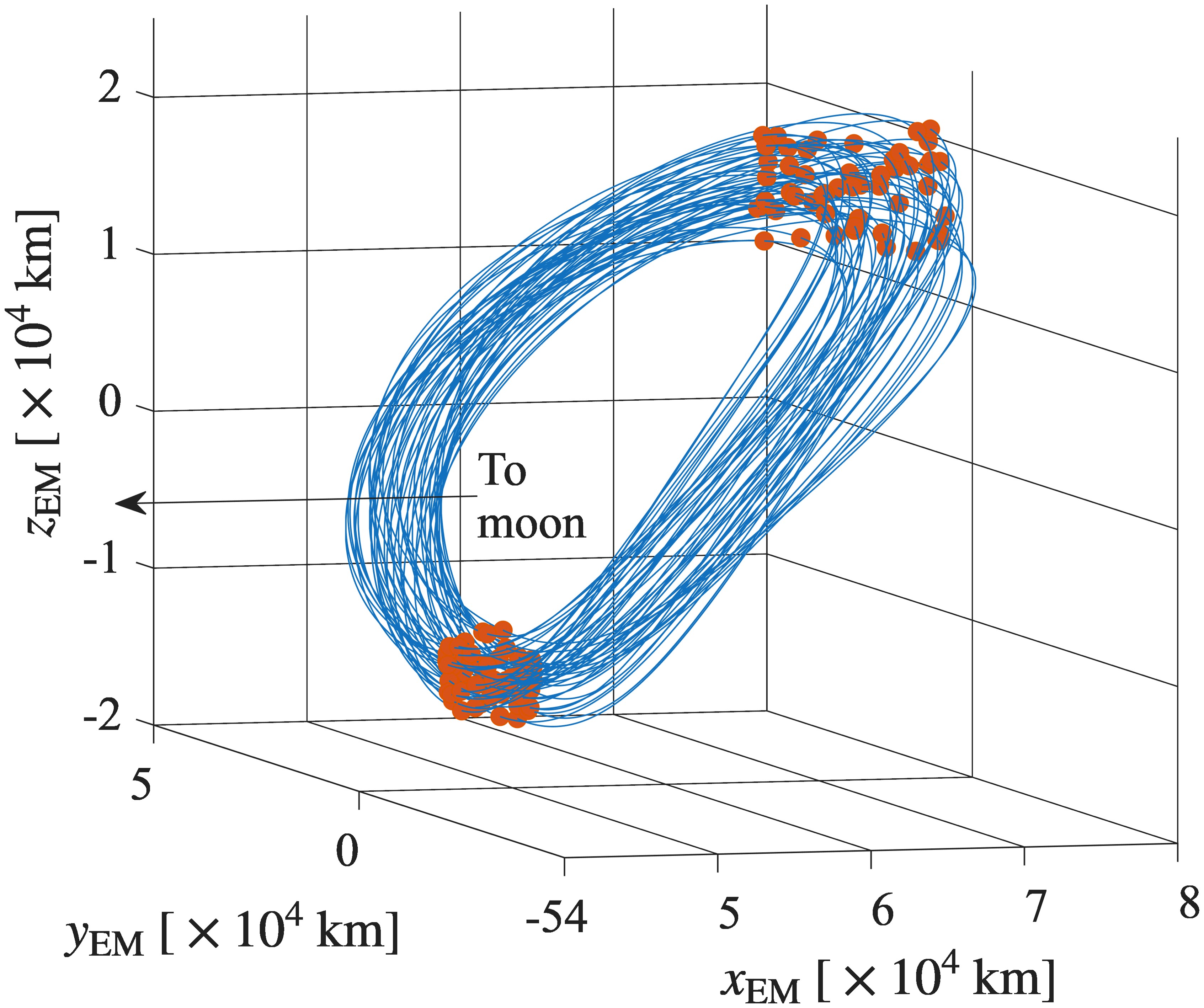
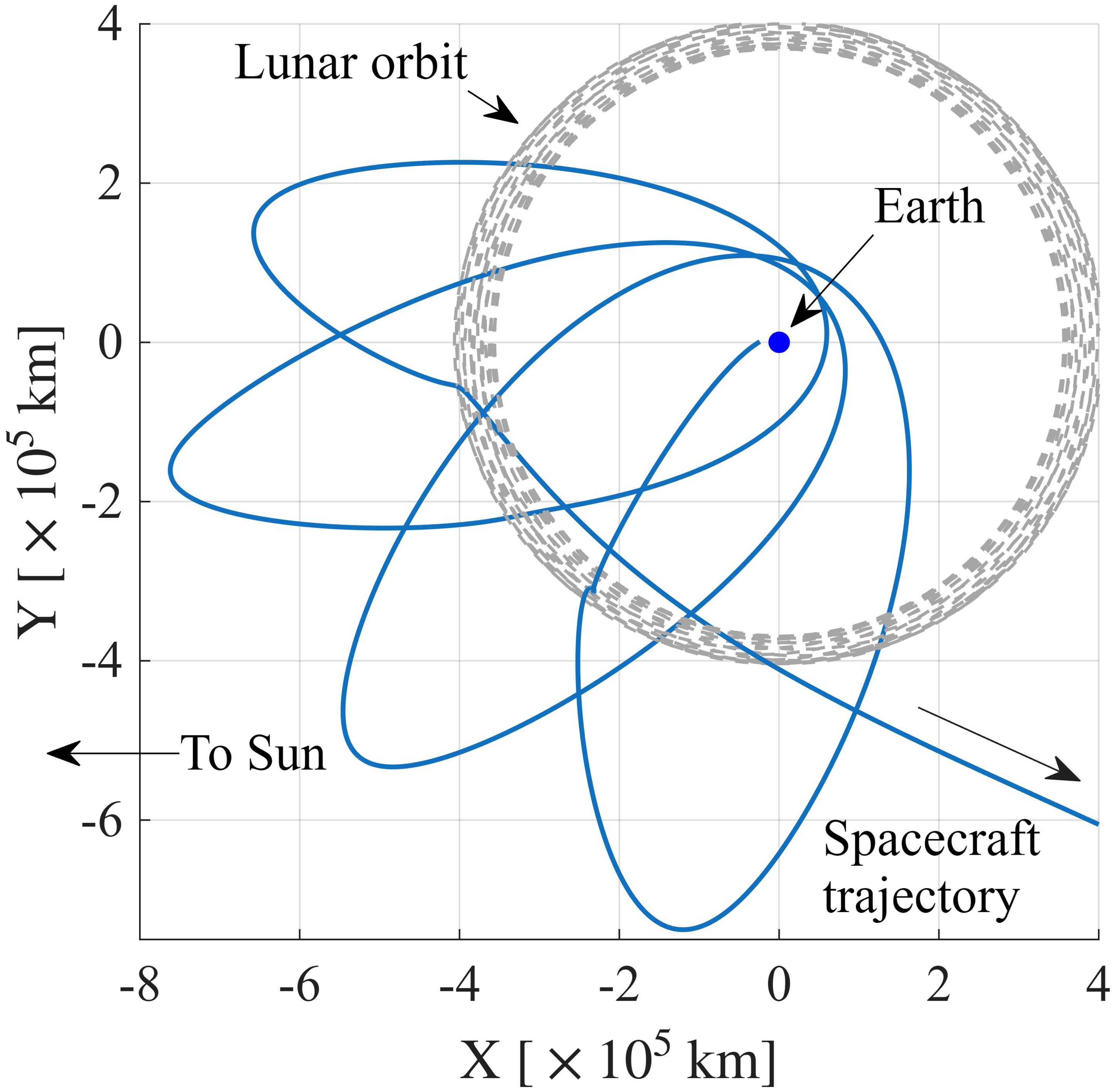
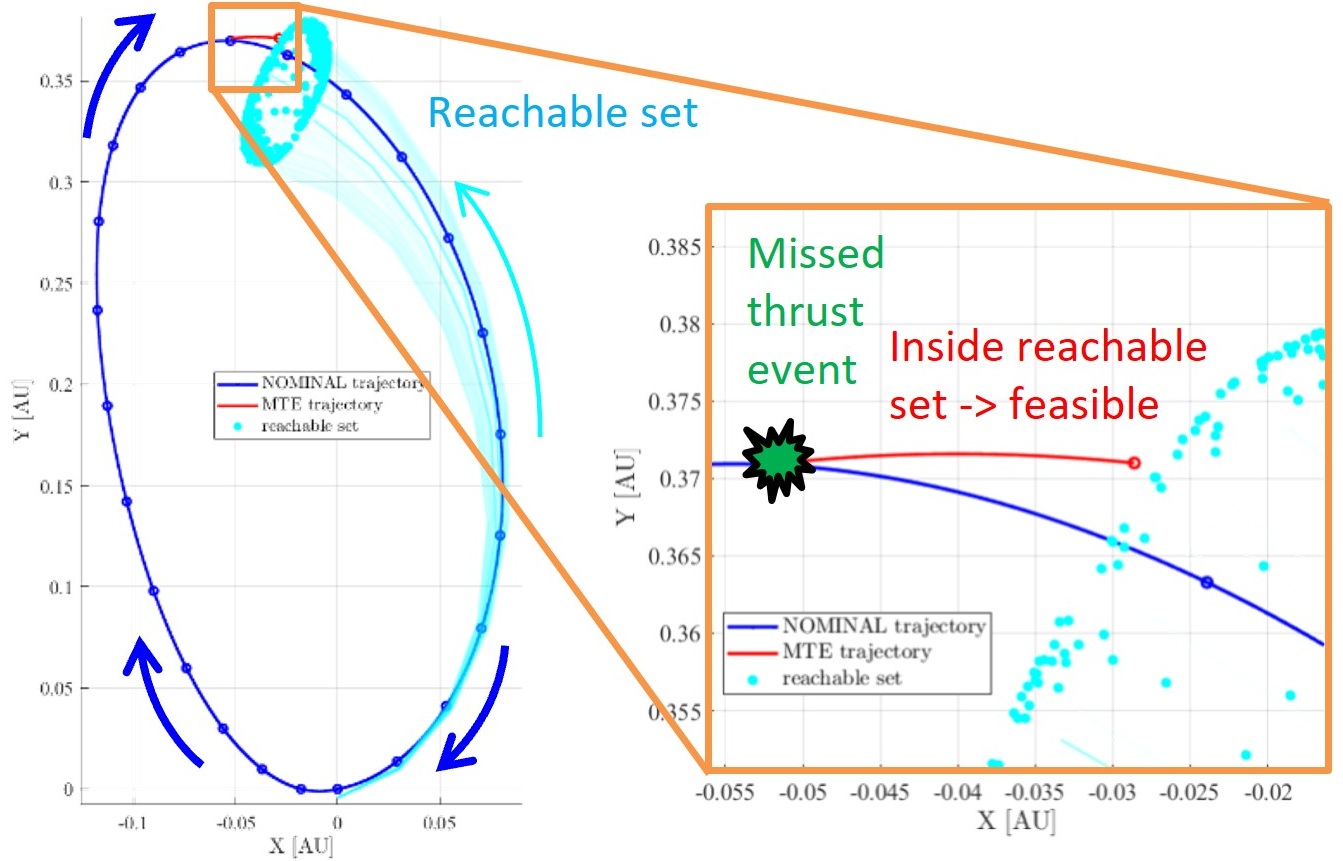
解析による軌道力学の理解と、将来のミッションへの応用に向けた軌道設計に取り組んでいます。宇宙機の軌道は、特定の点の周りを周回する軌道と、ある点から別の点へ移動する軌道に大別されます。また、地球周回軌道、地球-月圏軌道、惑星間軌道では、それぞれ大きく異なる力学特性を示します。当研究室では、これら多様な軌道を対象とした研究を行っており、特に将来の超小型ソーラーセイルによる深宇宙探査ミッションに資するテーマを重視しています。具体的には、ラグランジュ点周りの周回軌道の解析や、惑星間脱出軌道の設計などに取り組んでいます。さらに、宇宙機の不具合に対してロバストな軌道設計手法の開発を通じて、ミッション成功率の向上を目指しています。軌道設計ソフトウェアの開発も行っています。
誘導・制御理論
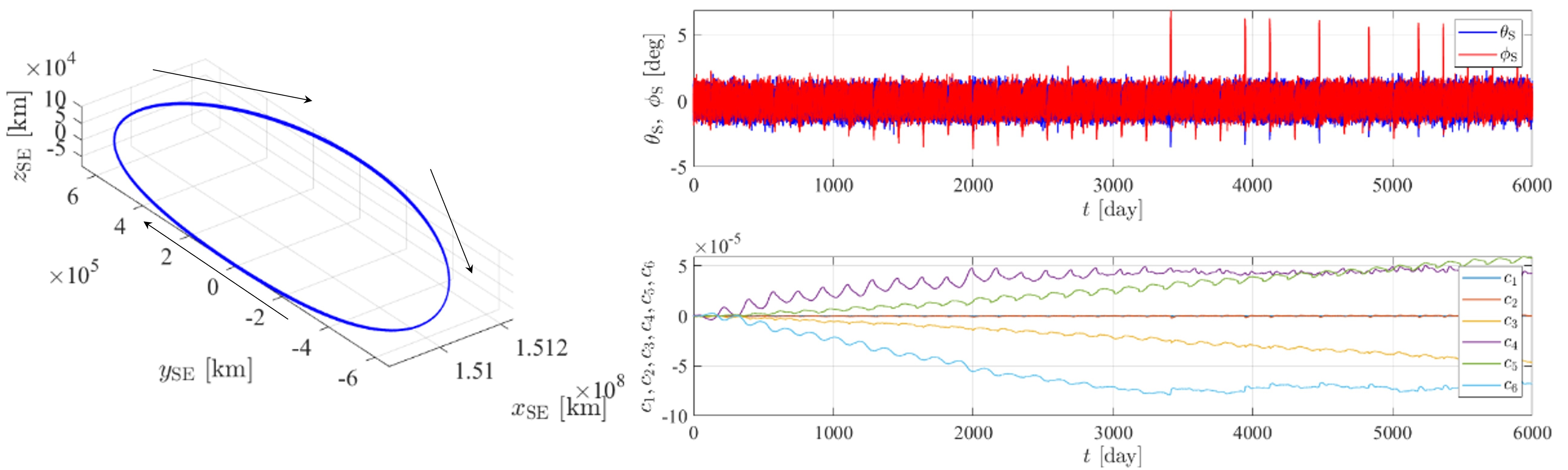
宇宙機は、軌道計画に基づき航行する必要があります。そのためには、設計された軌道を追従するための誘導・制御技術が不可欠です。当研究室では、誘導・制御理論に関する研究にも積極的に取り組んでいます。特に、ソーラーセイルを対象とした不確定性に対してロバストな誘導・制御手法の研究に注力しており、地球低軌道でのフォーメーションフライトや、ラグランジュ点周りのハロー軌道制御などへの応用を検討しています。さらに、衛星搭載コンピュータへの実装や、PIERIS ミッションにおける部分的な技術実証も視野に入れています。
姿勢力学・姿勢制御
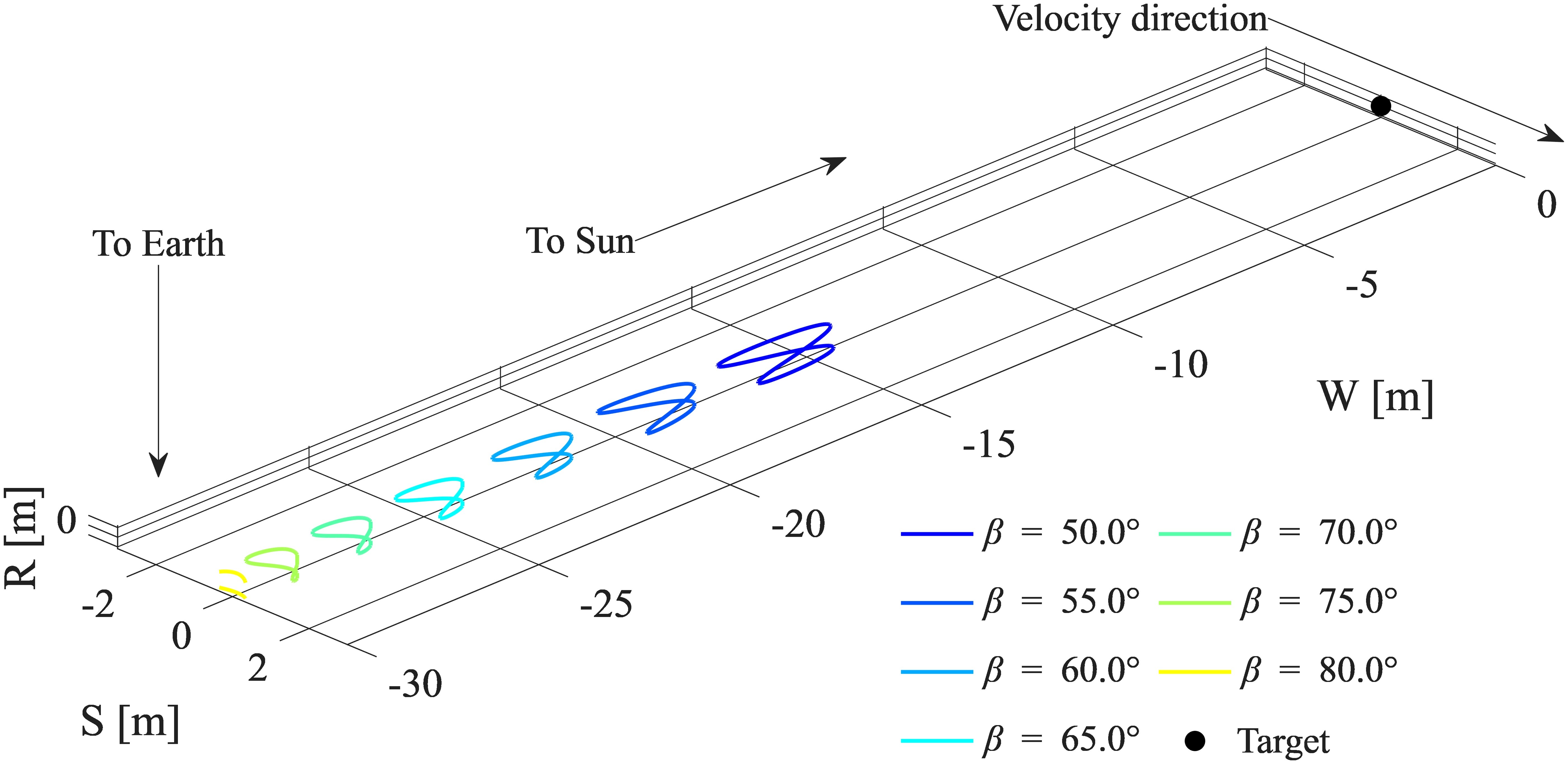
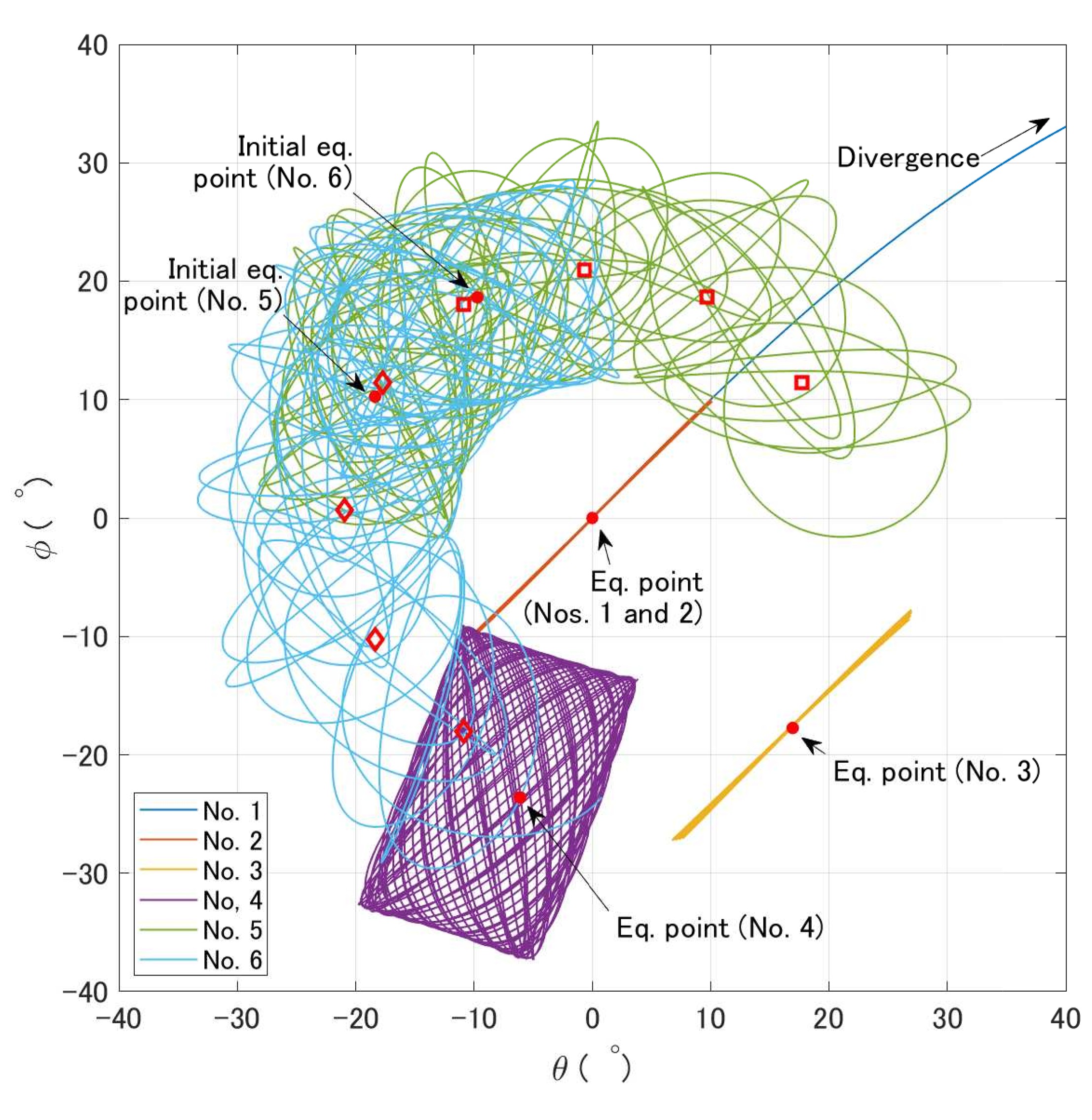
軌道が宇宙機の並進運動であるのに対し、姿勢は回転運動を表します。姿勢運動のダイナミクスは、地球低軌道と惑星間軌道とでは大きく異なります。特に地球低軌道では、大気抵抗トルク、太陽輻射圧トルク、重力傾斜トルク、残留磁気モーメントの影響を複合的に受け、姿勢運動は複雑になります。当研究室では、これらの環境要因を考慮した姿勢力学解析に取り組んでいます。また、宇宙機の形状に依存する環境力の姿勢への影響について体系的な理解を深めており、これが姿勢・軌道統合制御システムの研究に発展しています。誘導・制御理論を組み込んだシミュレータの開発も進めています。
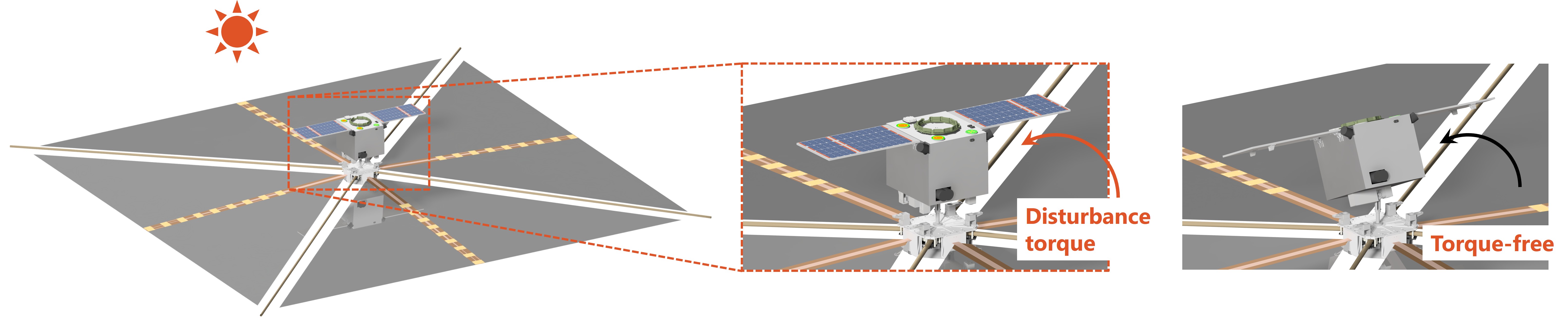
姿勢・軌道統合制御システム
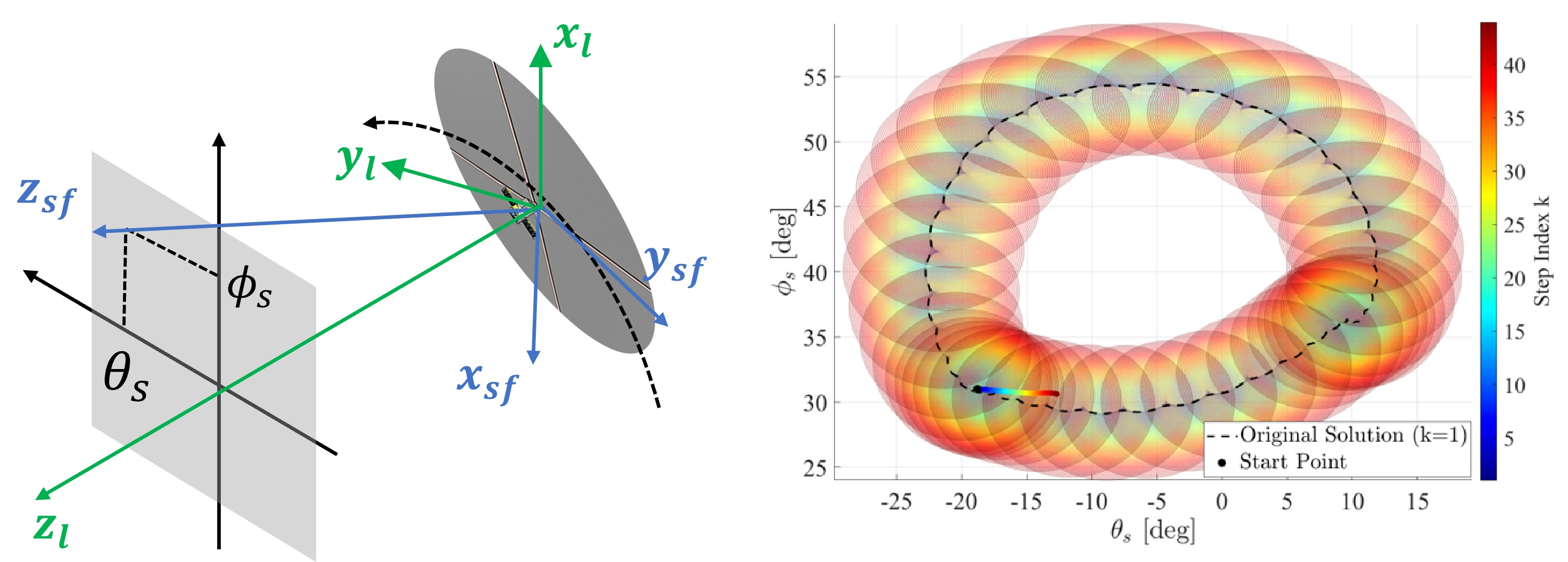
ソーラーセイルは、太陽輻射圧を用いた軌道制御を行うために、軌道計画から決まる姿勢を追従する制御が必要です。一方、太陽輻射圧は外乱トルクを生じさせ、それに対応する制御はリアクションホイールに角運動量を蓄積します。特に深宇宙では、これを放出するために推進剤の消費が必要となり、ソーラーセイルの特長を損ねてしまいます。この問題の解決手段として、ジンバルを用いた姿勢制御手法を提案しています。姿勢に応じてジンバル角を変化させることで、質量中心の位置を適切に変えて太陽輻射圧トルクを低減し、真に推進剤フリーなソーラーセイルの実現を可能とします。この姿勢・軌道統合制御システムは PIERIS ミッションで実証する最重要技術であり、現在、実際に搭載するシステムを開発しています。
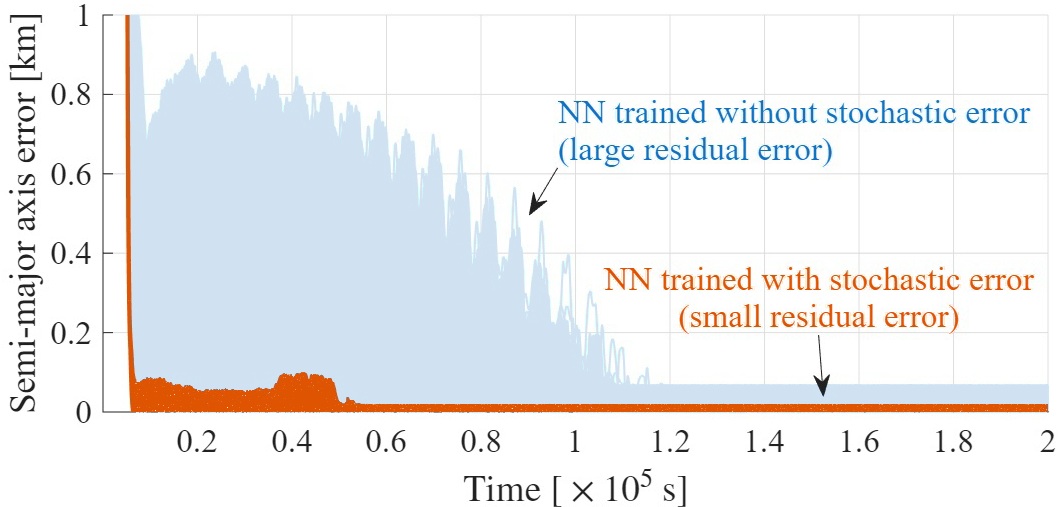
AI・機械学習応用
近年の AI 技術の発展に伴い、アストロダイナミクス分野においても機械学習を活用した研究が活発化しています。当研究室でも、そうした技術を取り入れた研究に取り組んでいます。現在は、不確定性に対してロバストな誘導・制御を、強化学習を用いて実現するための研究を進めています。
過去の卒業研究
- 修士
- 2025年度
- 地球低軌道におけるスピン型ソーラーセイルの姿勢運動(川口 雄生)
- 地球低軌道におけるソーラーセイルの相対軌道制御(正木 青空)
- 2024年度
- ソーラーセイルを用いたセーフモードイベントにロバストな軌道設計(荒井 湧介)
- ハイブリッドソーラー電力セイルによる月遷移軌道から月低軌道への軌道設計(大上 耕平)
- 2023年度(9月修了)
- 一軸ジンバルを有するソーラーセイルの角運動量管理に関する研究(中嶋 哲大)
- 2023年度
- 可変形状機能を有するソーラーセイルの角運動量制御に関する研究(木下 幹大)
- 小惑星近傍におけるソーラーセイルの軌道制御に関する考察(安田 萌恵)
- 2025年度
- 学士
- 2025年度
- 電力制約下における宇宙機の相対軌道制御に関する検討(阿部 祥万)
- 平面円制限三体問題における二重月スイングバイを利用した惑星間脱出軌道の検討(笠井 遼河)
- 地球周回軌道における強化学習を用いた軌道制御に関する考察(畑田 拳志)
- 2024年度
- 月スイングバイとソーラーセイルを利用した惑星間脱出軌道設計(座間味 栄馬)
- 2023年度
- 地球低軌道における超小型ソーラーセイルの姿勢制御の実現性検討(川口 雄生)
- 地球周回太陽同期軌道におけるソーラーセイルのOn-Offスイッチング制御による軌道高度上昇に関する考察(白石 響)
- 2022年度
- 超小型ソーラー電力セイルの角運動量管理を考慮した惑星間軌道設計と性能評価に関する考察(荒井 湧介)
- 一軸ジンバルを有するソーラー電力セイルのトルクフリー姿勢における推進効率の調査(上野 晟太郎)
- 2021年度
- ハロー軌道間の低エネルギー遷移軌道設計と特性調査(安田 萌恵)
- 2025年度