当研究室では、個々の研究活動に加え、超小型衛星プロジェクトにも取り組んでいます。
宇宙を自在に航行する未来を目指して
最先端の研究を、超小型衛星で実証する
超小型ソーラーセイル「PIERIS」
PIERIS の X アカウントはこちら。
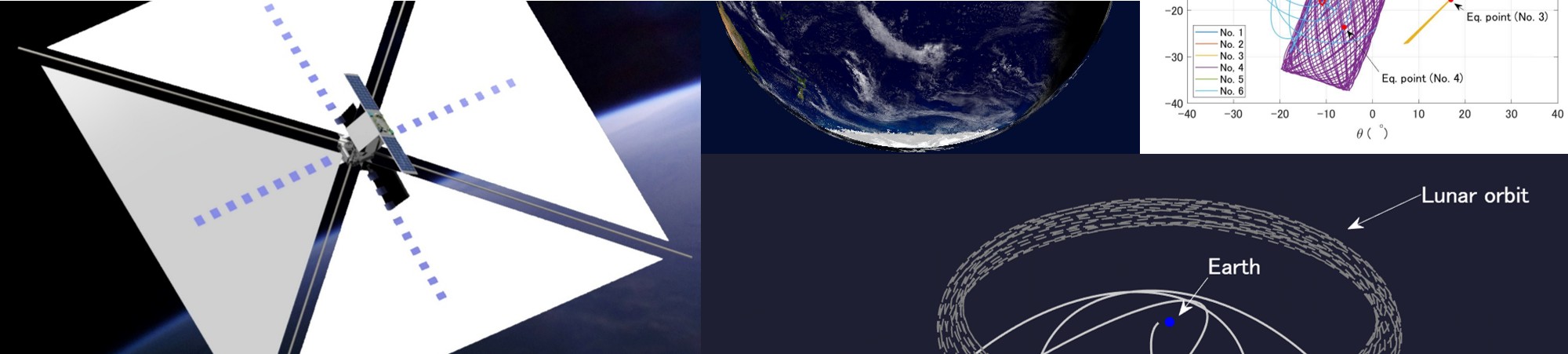
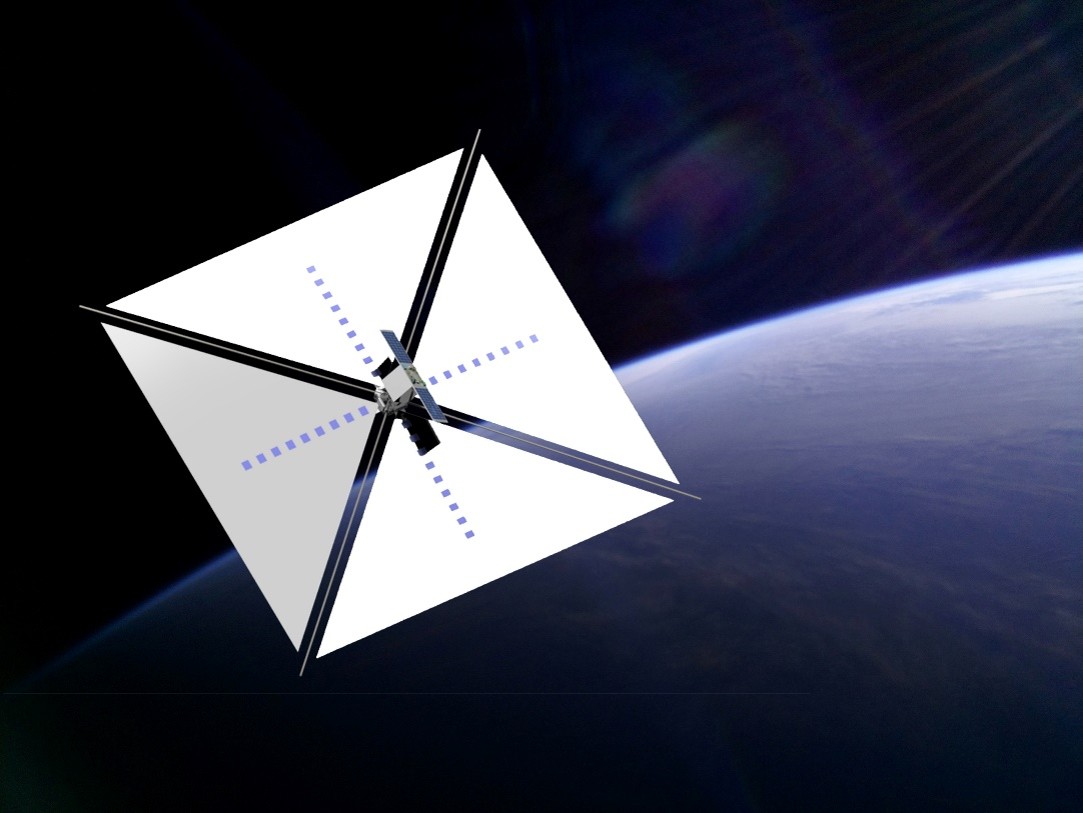
当研究室を中心に、JAXA 宇宙科学研究所 宮崎研究室、株式会社 cosmobloom と共同で開発中の、地球低軌道におけるソーラーセイル技術実証を目的とした工学衛星です。Powered Innovative Earth-orbiter with Reorientable Inclined Sail の頭文字を取り、「PIERIS」と名付けました。JAXA の「産学官による輸送・超小型衛星ミッション拡充プログラム(拡充 P、JAXA-SMASH)」第2回公募に選定されています。一辺 5 m のピラミッド状(四角錐)のセイルと、それを支持する自己伸展ブームを備え、ジンバルを介して衛星構体に搭載します。本ミッションでは、これを用いた姿勢・軌道統合制御技術の実証を通して、真に推進剤フリーなソーラーセイルの実現を目指します。当研究室は、ミッション設計、衛星システムの設計・開発および全体統括を担当しています。2027年度以降の打ち上げを予定しており、その後は深宇宙探査ミッションへの発展も構想しています。
X 線・ガンマ線観測および相対軌道制御技術実証衛星「GRAPHIUM」
ERATO 片岡ライン X 線ガンマ線イメージングプロジェクトのウェブサイトはこちら。
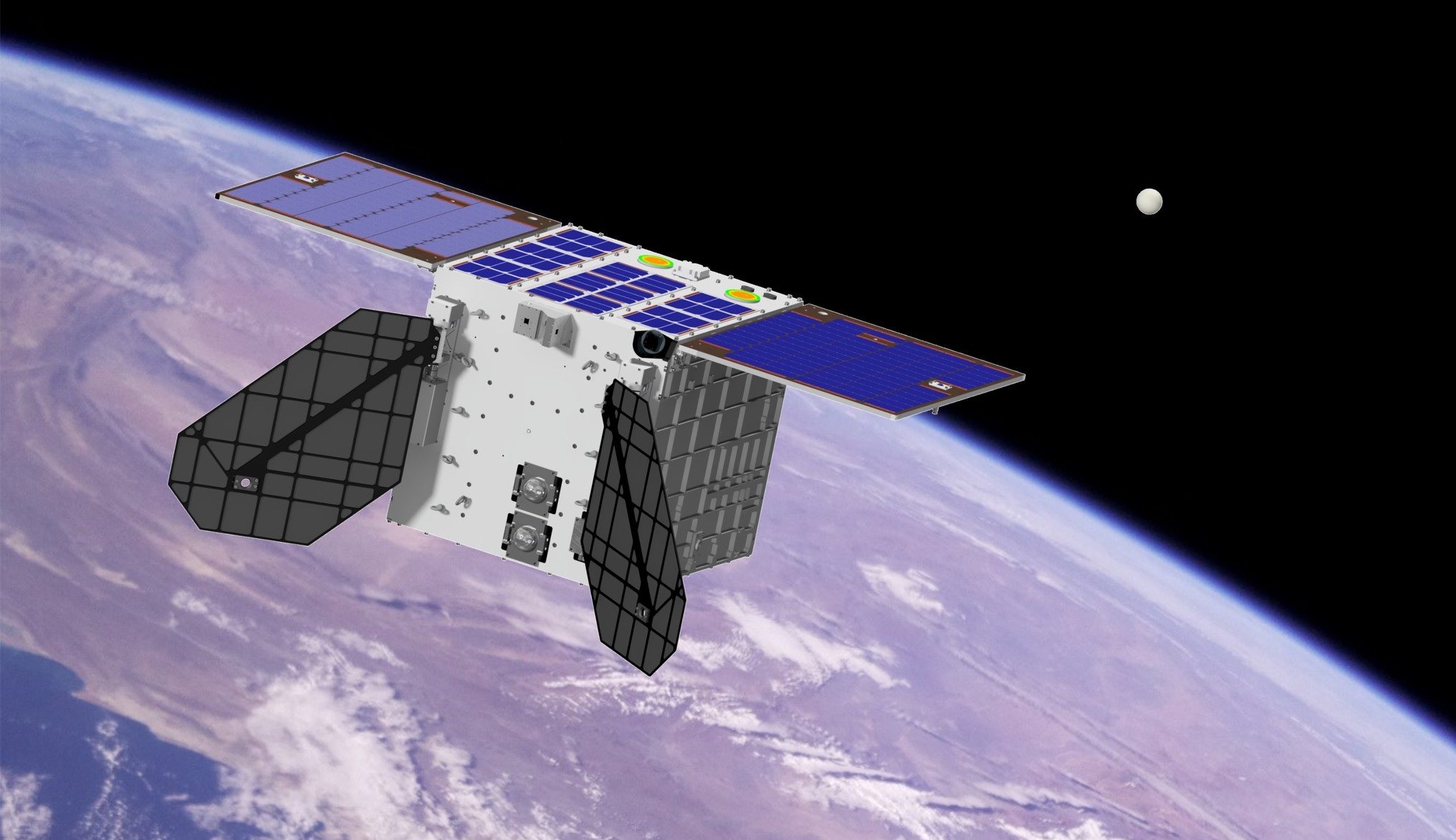
早稲田大学 片岡研究室および東京科学大学 谷津研究室が主導する、X 線・ガンマ線観測衛星です。理学観測に加え、相対軌道制御技術の実証も目指します。軌道上でターゲットマーカーを放出し、光学航法および空力制御パドルを用いた軌道制御により、これを追尾するフォーメーションフライト技術の実証を行います。当研究室は、衛星システム全体の開発を担当しています。
超小型衛星プロジェクトに興味をお持ちの方へ

衛星開発は、中西研究室・谷津研究室との協働体制のもと、研究室所属学生および関連グループのメンバーを中心に進めていますが、随時開発メンバーを募集しています。東京科学大学の研究室所属前の学生で、超小型衛星の開発に強い関心と意欲をお持ちの方は、お問い合わせに記載の連絡先までご連絡ください。状況により参加をお断りする場合がありますので、あらかじめご了承ください。